التحكم الدقيق ومحاكاة الروبوتات باستخدام ROS
التحكم الدقيق ومحاكاة الروبوتات باستخدام ROS
الخدمة متوقفة مؤقتاً وغير متاحة للشراء حاليًا.
عن الخدمة
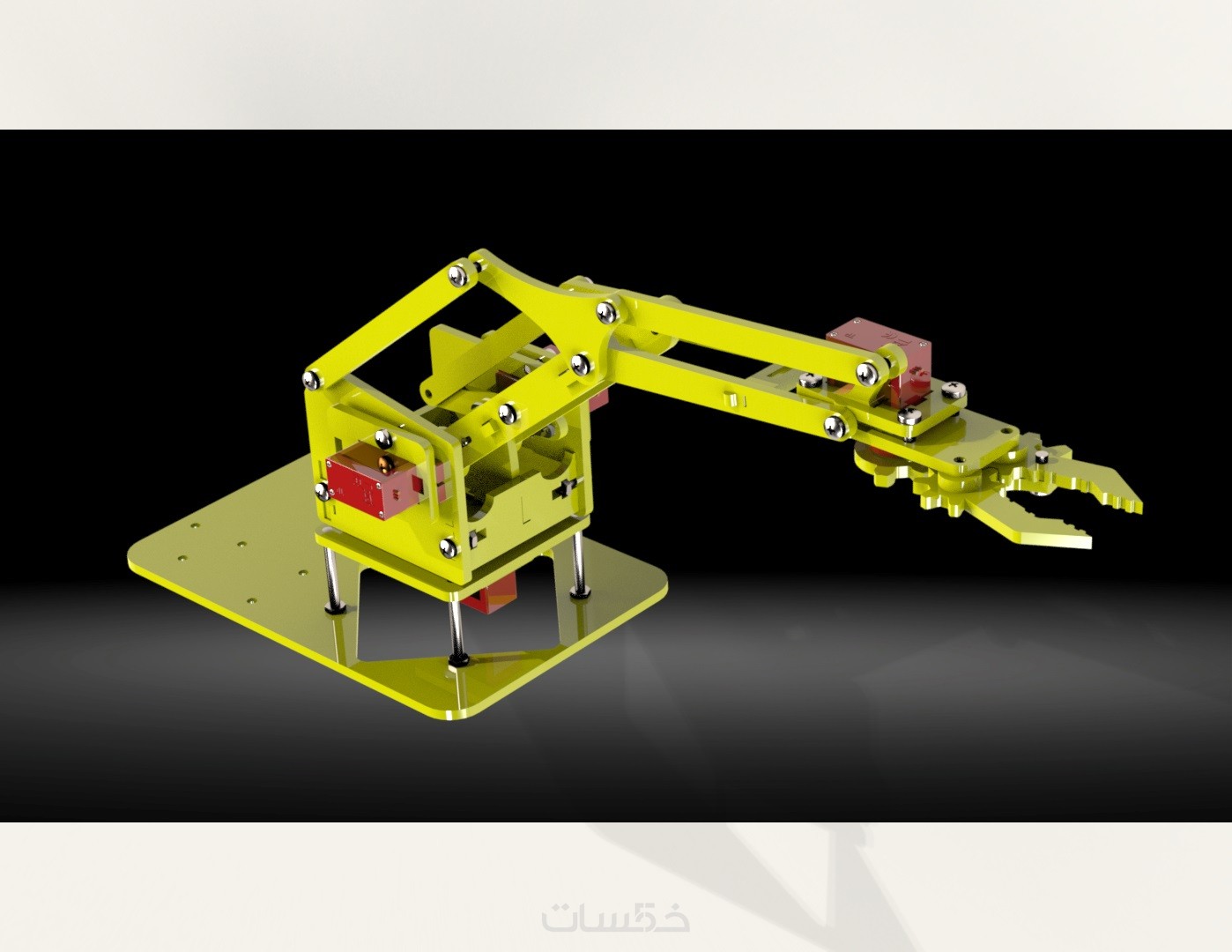
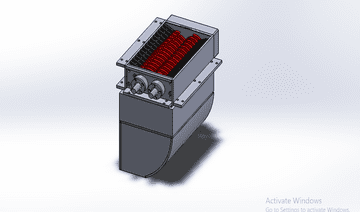
في هذه الخدمة يمكنني تصميم لك روبوت خاص إن كان ذراع روبوت أو روبوت او روبوت متحرك…
ماذا ستحصل عند طلب الخدمة:
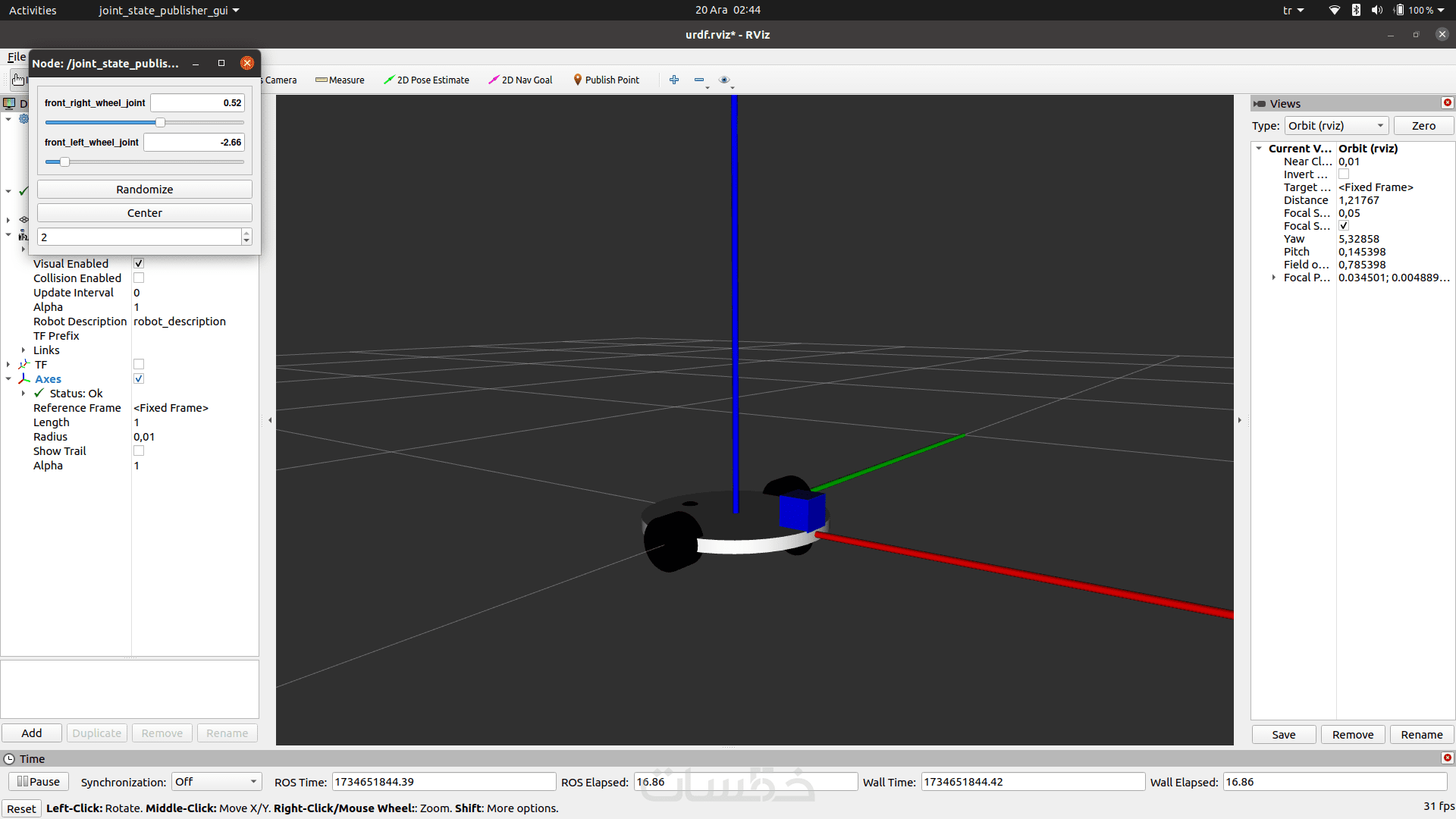
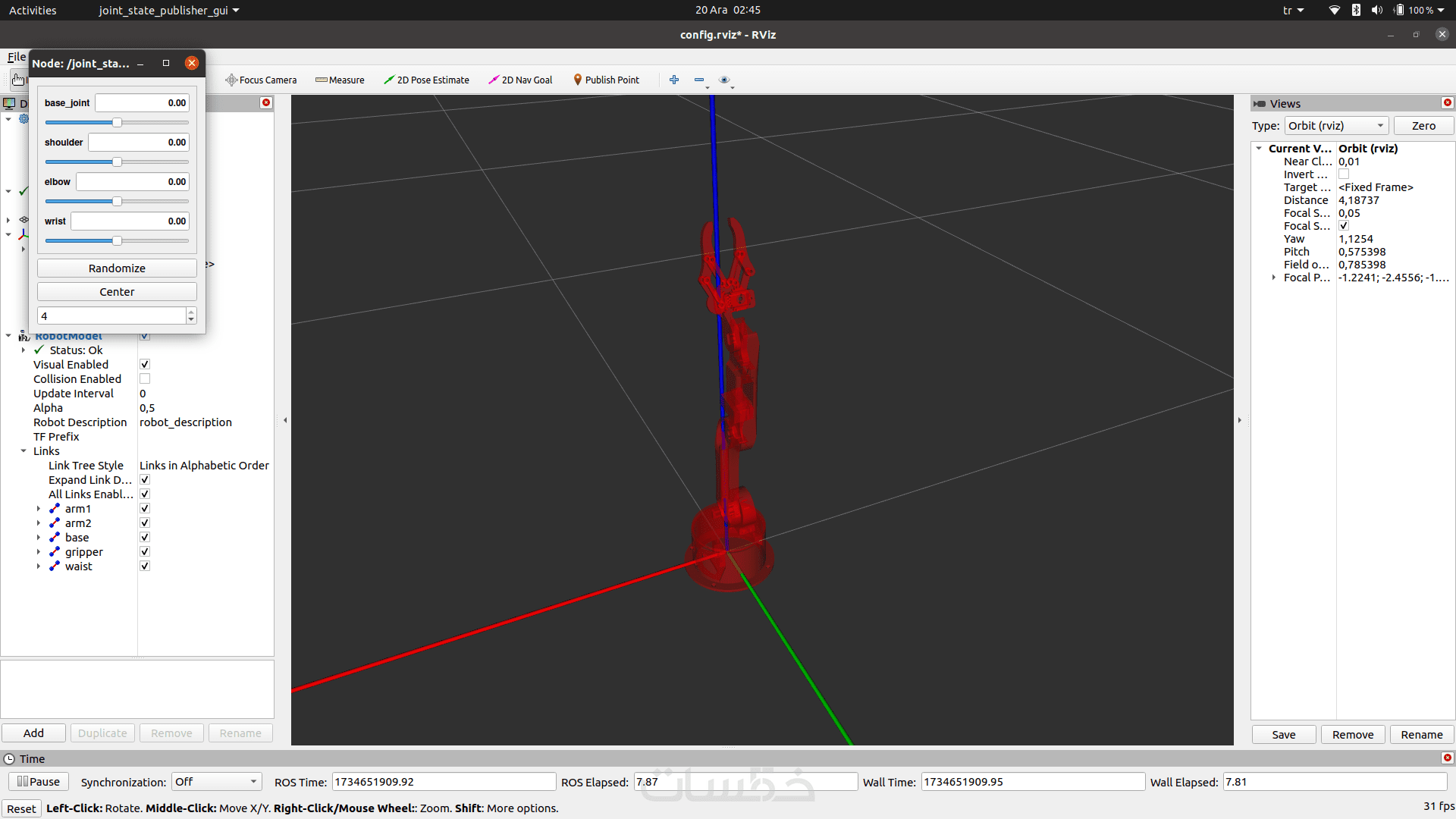
1_تصميم ملف xacro أو urdf :
هو عبارة عن ملف يقوم بوصف الروبوت من قطع ومفاصل وحساسات وكاميرات إن وجد
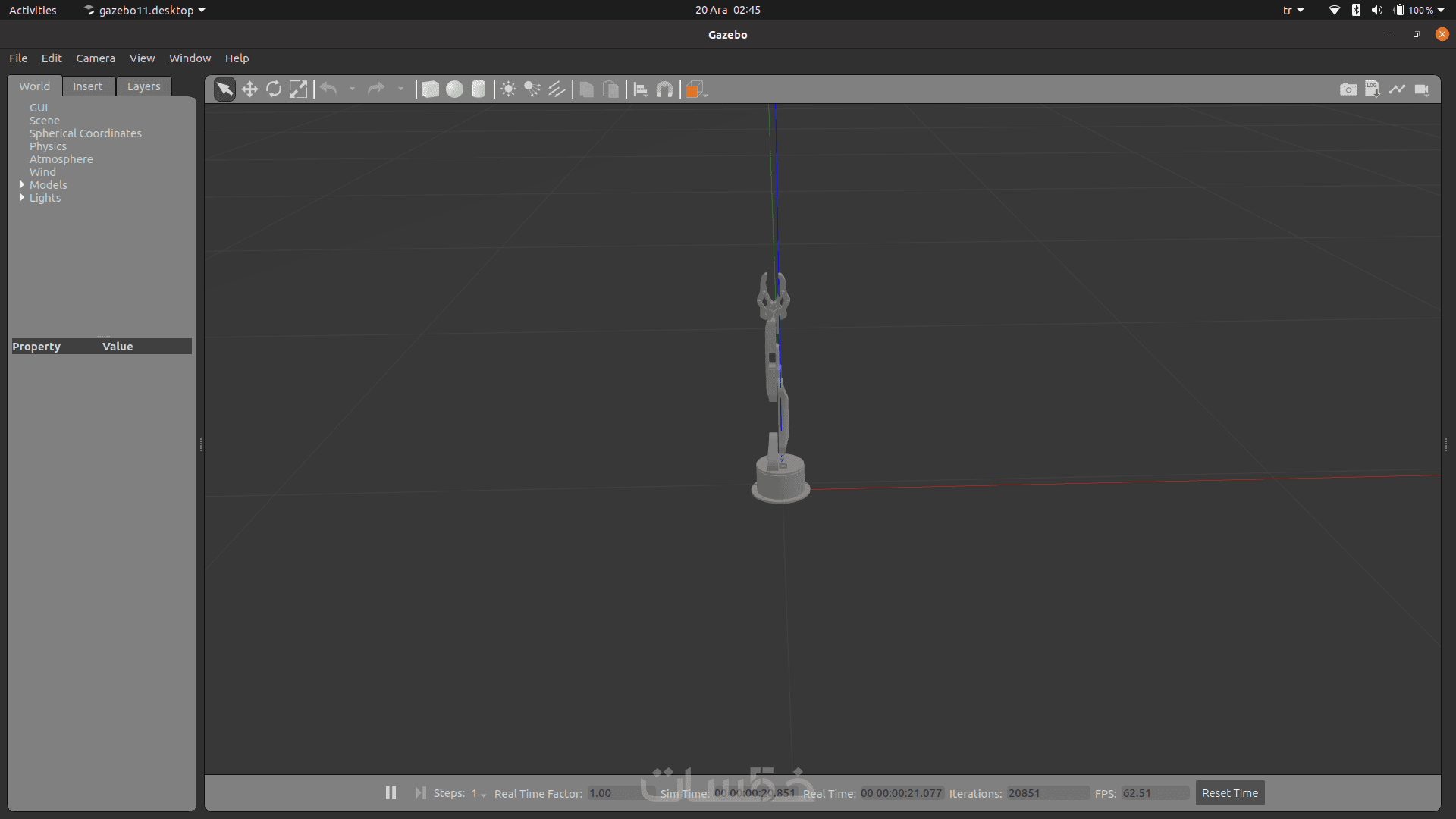
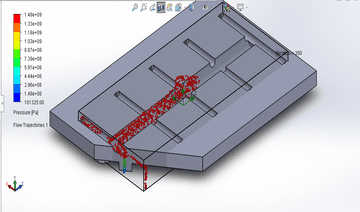
2_تجهيز باقي ملفات التشغيل لجعل الروبوت يعمل على المحاكي Gazebo
يعتبر هذا المحاكي مثالي للتحكم لأنه يحاكي القوانين الفيزيائية الواقعية
3_طبعا تجهيز ملف ال Launch
الذي عندما نقوم بتشغيله سيتم تشغيل الروبوت والمحاكي والمتحكمات
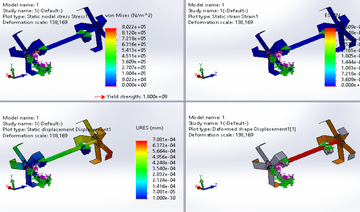
4_تجهيز ملف RQT
هو يضم خصائص الPID التي تمكننا من جعل حركة الروبوت مستقرة ويمكننا تعديل القيم داخله لنحصل على اكثر وضع مستقر للروبوت الخاص بنا
5_ واخيرا تجهيز ملف PDF لتعريف المستخدم المعلومات الاساسية لتشغيل الروبوت والتحكم به على المحاكي
كلمات مفتاحية
خدمات قد تنال إعجابك







































شراء الخدمة
سعر الخدمة
$10.00
تطويرات اختيارية
تصميم pkg لتخطيط الحركة بواسطة movelt لحفظ وتنفيذ مسارات متخصصة
10.00
|
|
انشاء صفحة ويب للتحكم بالروبوت عن طريق الهاتف
25.00
|
|
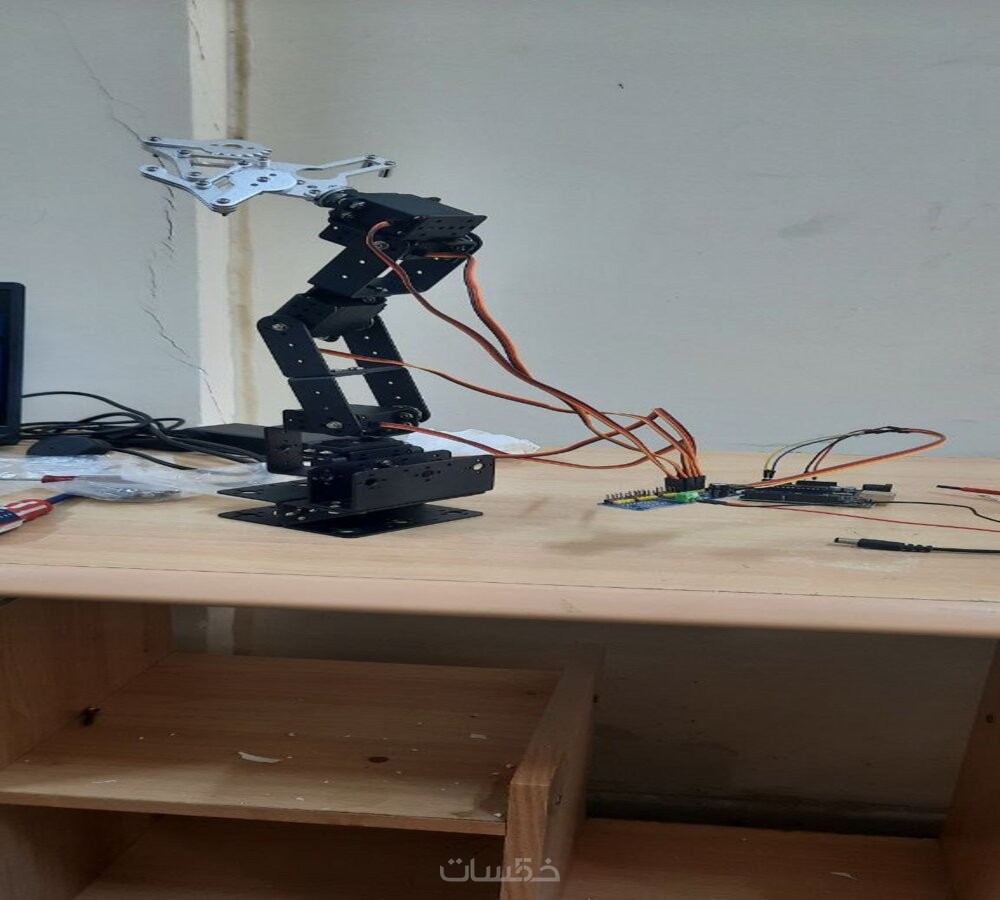
كتابة node لنقل الحركة الى الواقع مع طريقة توصيل المحركات
30.00
|


شراء الخدمة
سعر الخدمة
$10.00
تطويرات اختيارية
تصميم pkg لتخطيط الحركة بواسطة movelt لحفظ وتنفيذ مسارات متخصصة
10.00
|
|
انشاء صفحة ويب للتحكم بالروبوت عن طريق الهاتف
25.00
|
|
كتابة node لنقل الحركة الى الواقع مع طريقة توصيل المحركات
30.00
|
خدمات قد تنال إعجابك
كلمات مفتاحية
