بناء روبوت واقعي باستخدام ROS2 تحكم، حركة
بناء روبوت واقعي باستخدام ROS2 تحكم، حركة
وصف الخدمة
أقدم لك خدمة احترافية لمساعدتك في بناء وتشغيل روبوت متحرك (Mobile Robot) باستخدام ROS2، بداية من التحكم في الحركة وحتى تشغيل النظام بشكل عملي.
الخدمة الأساسية تشمل:
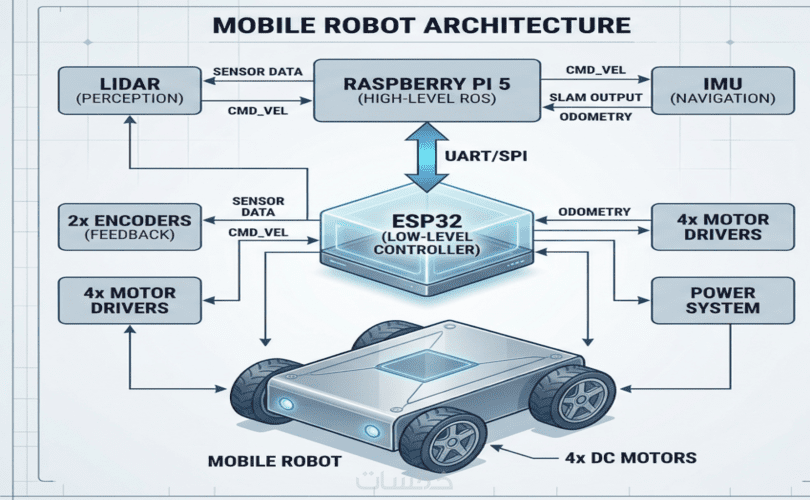
• مناقشة المكونات واختيار افضل المكونات الاساسية لتشغيل المشروع باعلي كفاءة من ناحية الاداء والسعر
• إعداد نظام حركة للروبوت (Differential Drive)
• التحكم في الموتورات وتحريك الروبوت
• ربط الروبوت مع ROS2 وتشغيله
• التحكم في الروبوت باستخدام الكيبورد
• تنظيم الباكيدج والـ Launch files بشكل احترافي
• ملف به طريقةتشغيل النظام علي جهازك الشخصي
هذه الخدمة تضمن لك روبوت يتحرك بشكل صحيح ويمكن تحريكه باستخدام الكيبورد علي جهازك الشخصي وجاهز للتطوير.
إضافات يمكن تنفيذها حسب طلبك:
• إضافة حساسات ودمجها مع النظام (LiDAR / IMU / Camera / GPS)
• تطبيق Sensor Fusion لتحسين دقة الروبوت
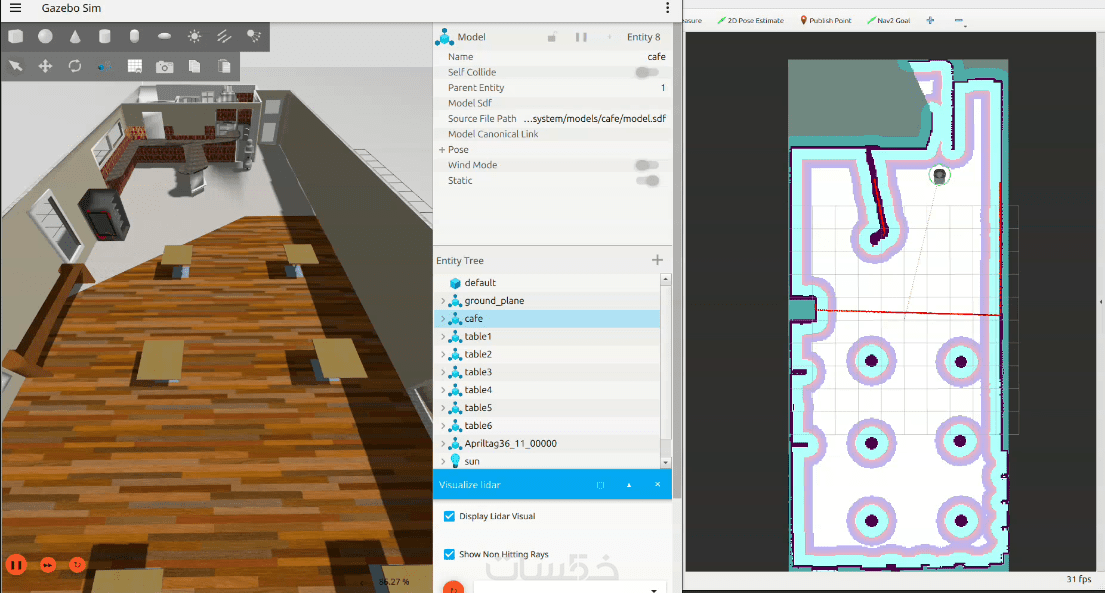
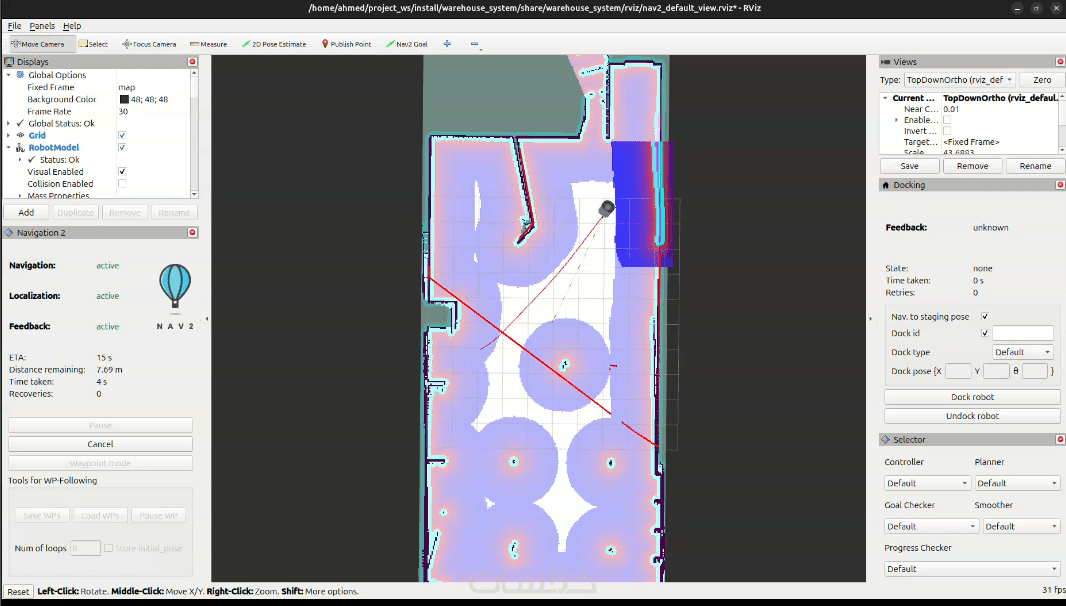
• إعداد Navigation لتحريك الروبوت بشكل ذاتي
• برمجة Nodes مخصصة لتنفيذ مهام معينة
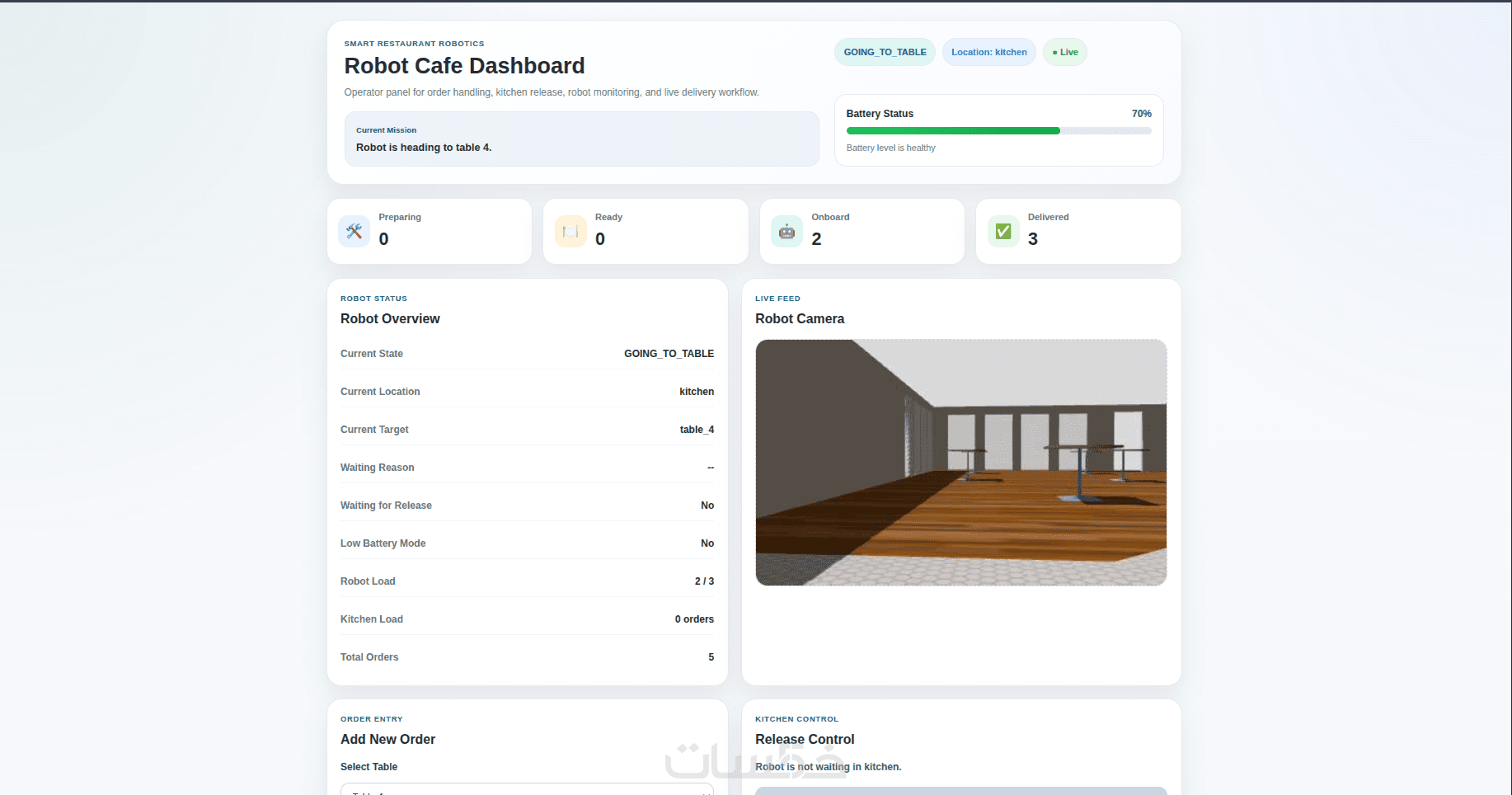
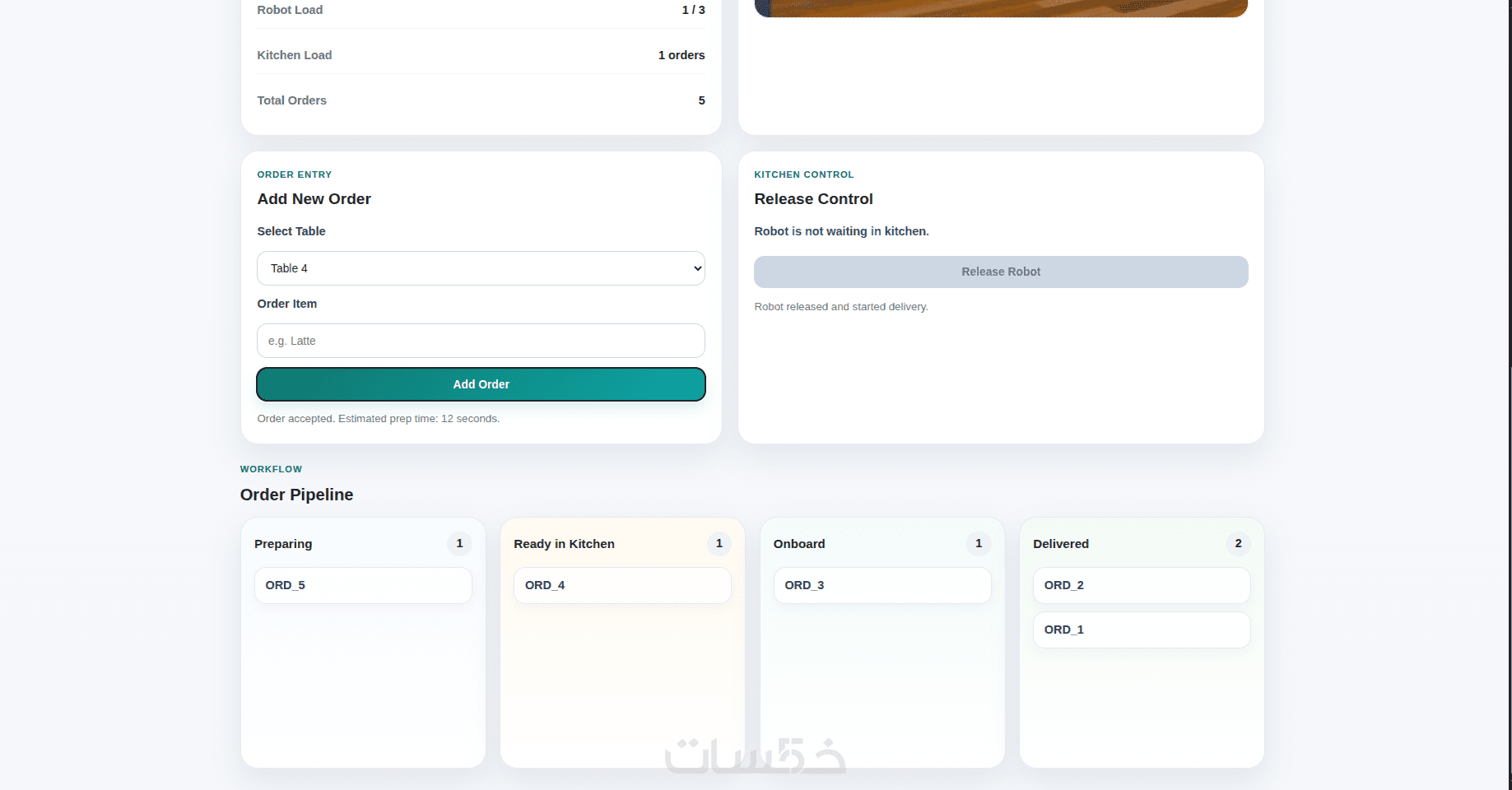
• إنشاء واجهة تحكم (Web Dashboard) لمراقبة الروبوت والتحكم فيه
كلمات مفتاحية
خدمات قد تنال إعجابك











طلب الخدمة
سعر الخدمة
$50.00
تطويرات اختيارية
اضافة حساس اضافي وربطه بالروبوت (Gps/Camera/Lidar)
10.00
|
|
اضافة واجهة تحكم (Web Dashboard) للتحكم في الروبوت
25.00
|
|
تنفيذ مهمة خاصة للروبوت (الذهاب لمكان معين - تشغيل lifter - القيام بنشاط معين )
40.00
|
|
جلسة شرح مباشر (ساعة)
10.00
|


طلب الخدمة
سعر الخدمة
$50.00
تطويرات اختيارية
اضافة حساس اضافي وربطه بالروبوت (Gps/Camera/Lidar)
10.00
|
|
اضافة واجهة تحكم (Web Dashboard) للتحكم في الروبوت
25.00
|
|
تنفيذ مهمة خاصة للروبوت (الذهاب لمكان معين - تشغيل lifter - القيام بنشاط معين )
40.00
|
|
جلسة شرح مباشر (ساعة)
10.00
|
خدمات قد تنال إعجابك
كلمات مفتاحية
