محاكاة والتحكم في ذراع آلية Robot Arm بإستخدام ROS2
محاكاة والتحكم في ذراع آلية Robot Arm بإستخدام ROS2
عن الخدمة
أقدم مجموعة من الخدمات المتخصصة في تصميم ومحاكاة الروبوتات لضمان تنفيذ المشاريع بكفاءة وواقعية عالية.
الخدمات المقدمة في الخدمة الأساسية:
1. إنشاء ملفات URDF/XACRO:
سأقوم بتصميم ملفات URDF/XACRO لوصف الروبوت بدقة، بما يشمل توصيف الوصلات (Links) والمفاصل (Joints) وتحديد علاقاتها.
سيتم تسليم ملف واحد URDF/XACRO.
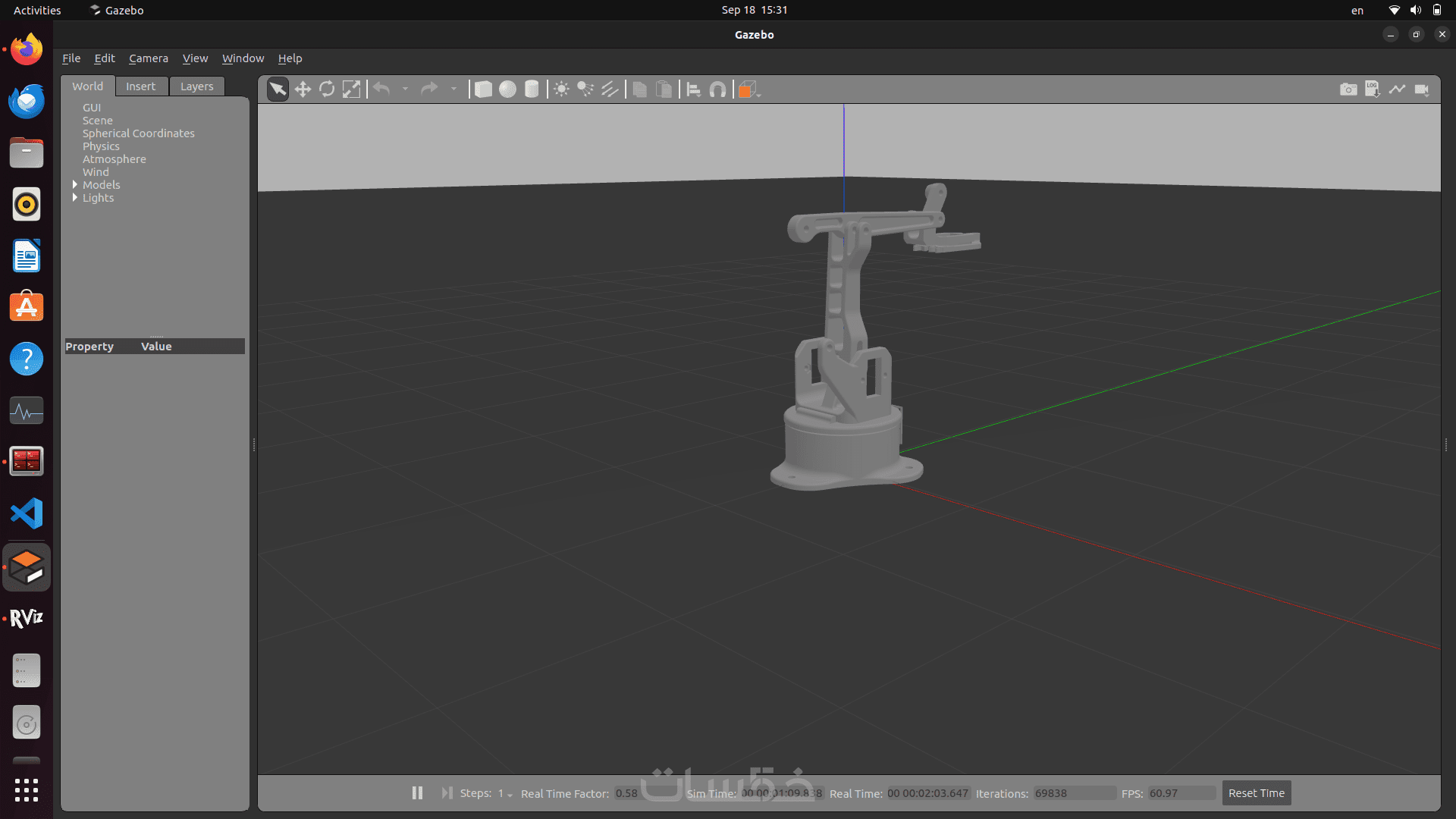
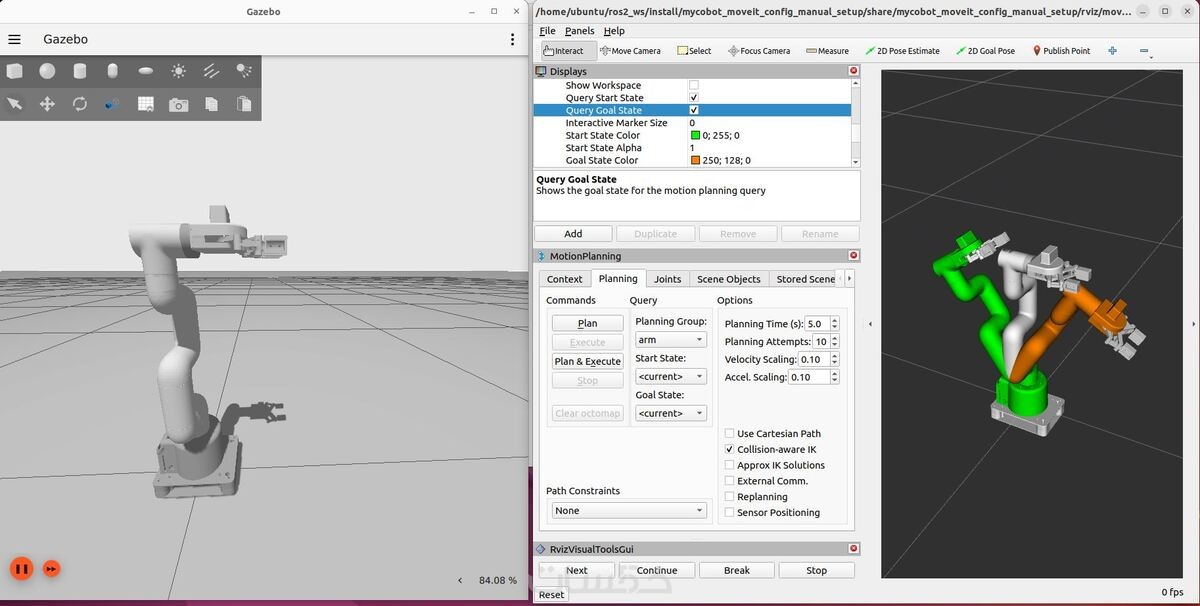
2. المحاكاة باستخدام Gazebo:
سيتم دمج الروبوت مع محاكي Gazebo لمحاكاة الحركة وديناميكية الروبوت.
تشمل الخدمة إعداد ملف Launch لبدء المحاكاة تلقائيًا.
سيتم تسليم ملف Launch واحد، وشرح كيفية تشغيل المحاكاة.
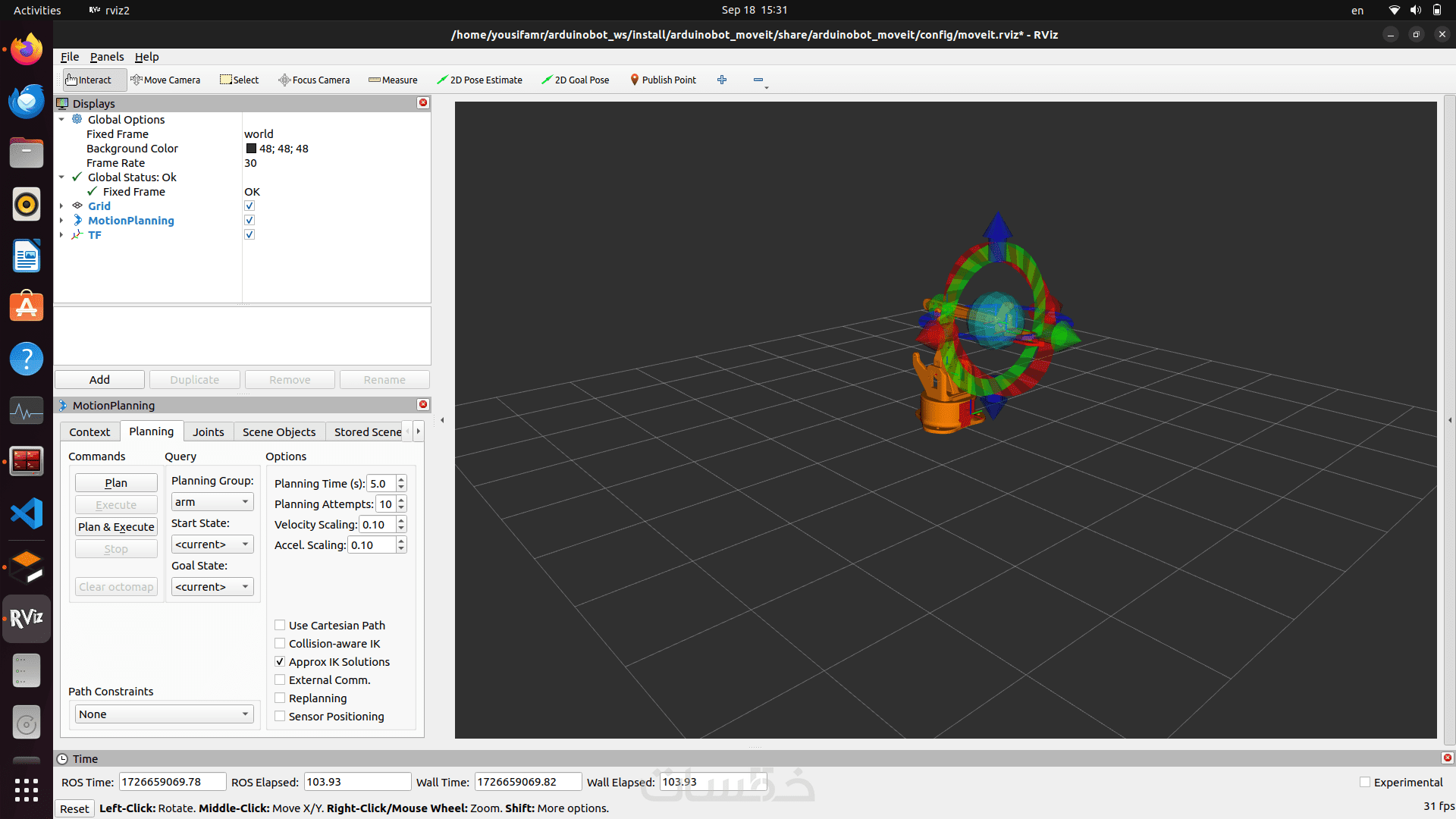
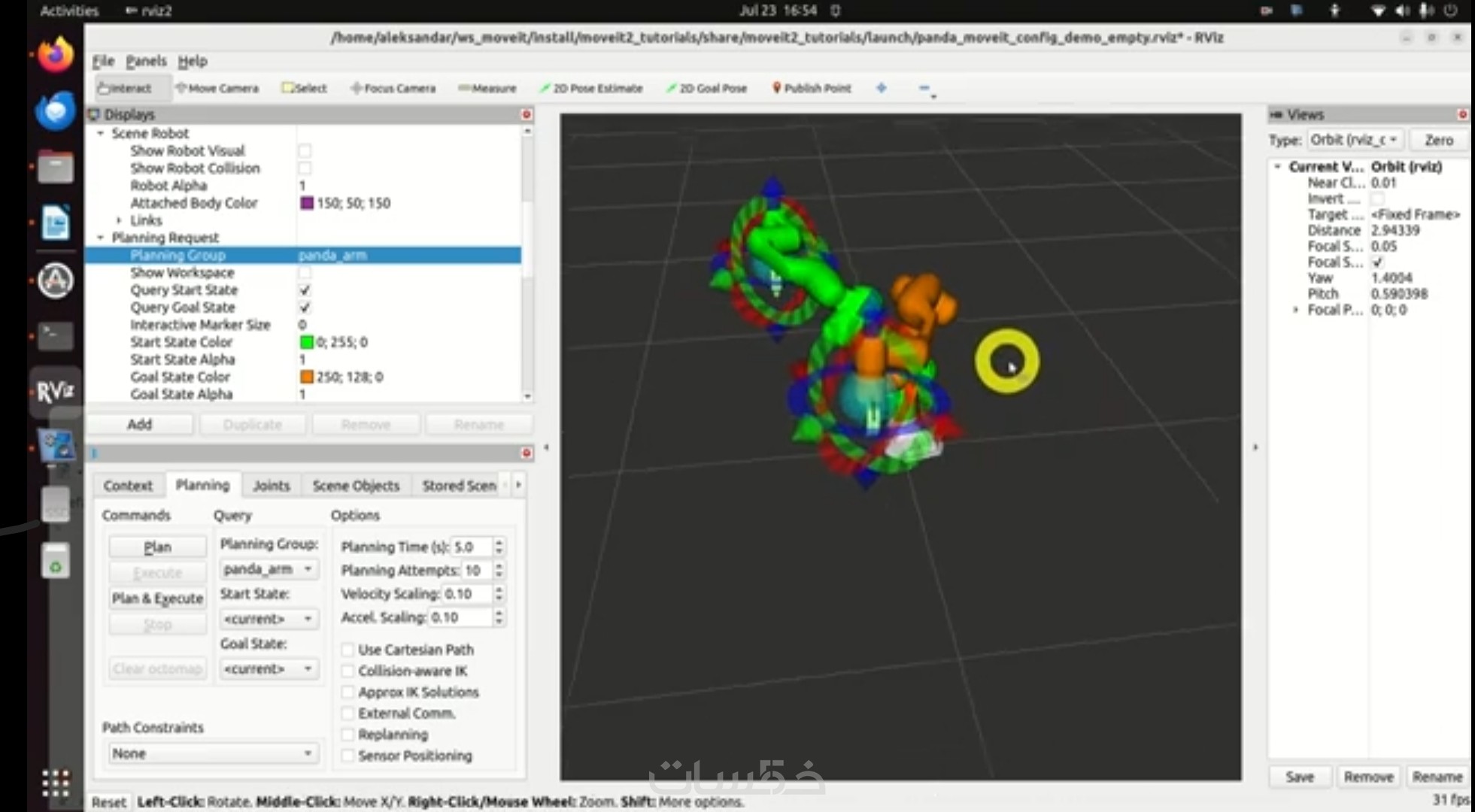
3. العرض ثلاثي الأبعاد باستخدام RViz2:
إنشاء ملفات Launch لتفعيل العرض ثلاثي الأبعاد في RViz2 لمراقبة حركة الروبوت في الزمن الفعلي.
سيتم تسليم ملف Launch واحد مع إعدادات RViz2، يتضمن جميع التفاصيل لتتبع الروبوت أثناء المحاكاة.
4. توثيق المشروع:
سيتم إعداد وثائق شاملة في ملف pdf واحد تشرح كل مراحل المشروع من التصميم إلى المحاكاة
كلمات مفتاحية
خدمات قد تنال إعجابك












آراء المشترين

السلام عليكم و رحمه الله و بركاته كان من الرائع التعامل مع استاذ يوسف فهو متمكن من الروبوتات و كيفيه التعامل معها كما انها امين في التعامل و ايصال المعلومه ارشح التعامل معه للقيام بمشاريعكم

رجل عظيم بكل ما تعنيه الكلمة حريص ومبادر ومهتم بمشروعك اكثر منك وهذا ماهو اخر تعامل مع المهندس يوسف الله يوفقه يارب

متساعد جدا وذو خبرة جيدة جدا يلبي طلبات العملاء دون تقصير السرعة في التسليم شكرا مهندس يوسف على الخدمة

طلب الخدمة
سعر الخدمة
$25.00
تطويرات اختيارية
تخطيط الحركات: ربط الروبوت بحزمة MoveIt 2 لتنفيذ مسارات مخصصة.
40.00
|
|
الحركيات الأمامية (Forward Kinematics): تطوير كود للتحكم في الروبوت عبر زوايا المحركات.
100.00
|
|
الحركيات العكسية (Inverse Kinematics): برمجة التحكم في موقع واتجاه End Effector الخاص بالروبوت.
150.00
|


طلب الخدمة
سعر الخدمة
$25.00
تطويرات اختيارية
تخطيط الحركات: ربط الروبوت بحزمة MoveIt 2 لتنفيذ مسارات مخصصة.
40.00
|
|
الحركيات الأمامية (Forward Kinematics): تطوير كود للتحكم في الروبوت عبر زوايا المحركات.
100.00
|
|
الحركيات العكسية (Inverse Kinematics): برمجة التحكم في موقع واتجاه End Effector الخاص بالروبوت.
150.00
|
خدمات قد تنال إعجابك
آراء المشترين
السلام عليكم و رحمه الله و بركاته كان من الرائع التعامل مع استاذ يوسف فهو متمكن من الروبوتات و كيفيه التعامل معها كما انها امين في التعامل و ايصال المعلومه ارشح التعامل معه للقيام بمشاريعكم
رجل عظيم بكل ما تعنيه الكلمة حريص ومبادر ومهتم بمشروعك اكثر منك وهذا ماهو اخر تعامل مع المهندس يوسف الله يوفقه يارب
متساعد جدا وذو خبرة جيدة جدا يلبي طلبات العملاء دون تقصير السرعة في التسليم شكرا مهندس يوسف على الخدمة
كلمات مفتاحية
