محاكاة Mobile Robot باستخدام ROS2 و Gazebo-sim
محاكاة Mobile Robot باستخدام ROS2 و Gazebo-sim
وصف الخدمة
أقدم خدمة إعداد ومحاكاة روبوت متحرك باستخدام ROS2
الخدمة الأساسية تشمل:
1. إعداد وصف الروبوت:
إنشاء ملف XACRO يحتوي على توصيف الروبوت والوصلات والمفاصل.
يتضمن ros2_control وملف controllers.yaml لنظام Differential Drive.
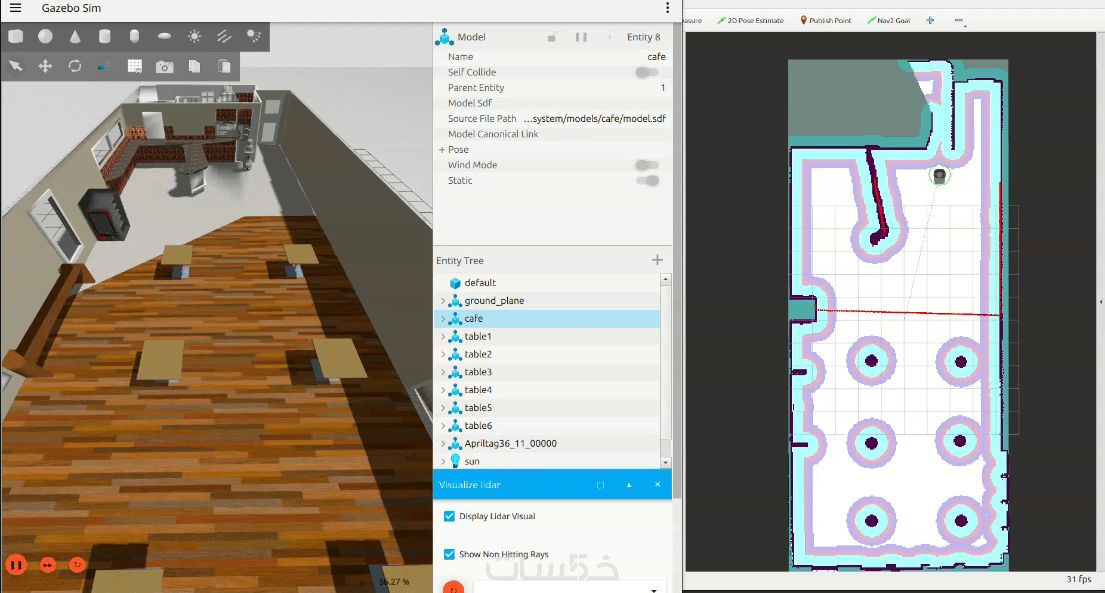
2. المحاكاة باستخدام Gazebo:
تشغيل الروبوت داخل Empty World.
تسليم:
- ملف launch لتشغيل Gazebo
- ملف world
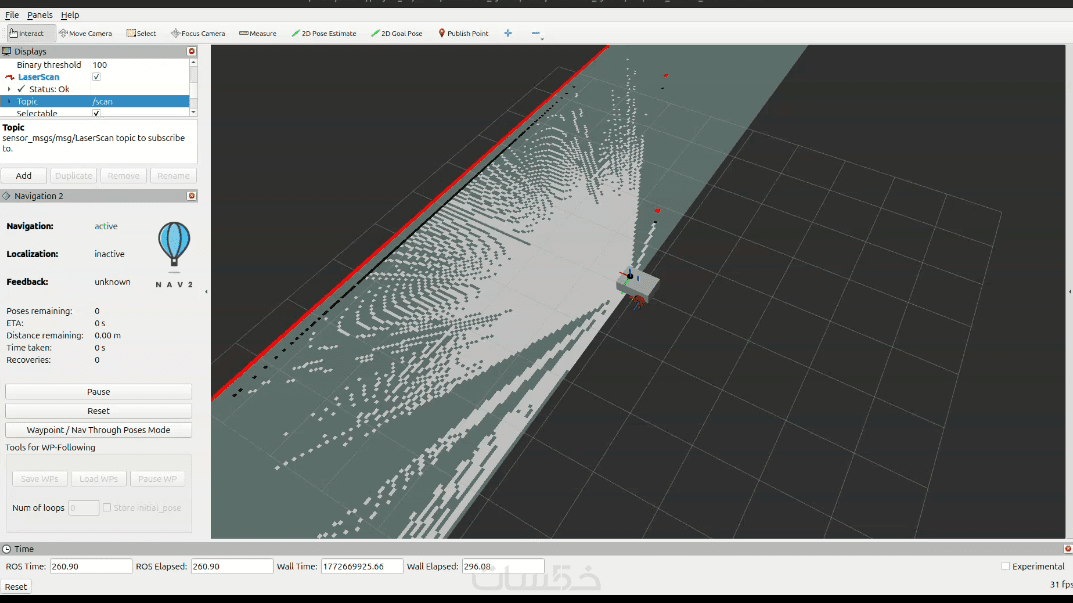
3. العرض باستخدام RViz2:
عرض الروبوت وبياناته في الزمن الحقيقي.
تسليم:
- ملف launch لتشغيل RViz
- ملف إعداد RViz
4. التحكم في الروبوت:
تشغيل Teleop لتحريك الروبوت.
تسليم أوامر جاهزة للتحكم من الكيبورد.
5. إعداد المشروع:
تسليم Workspace منظم يحتوي على:
- package الروبوت
- ملفات launch
- ملفات config
6. التوثيق:
ملف PDF يشرح التشغيل وخطوات الاستخدام وطريقة التشغيل علي جهازك الشخصي
كلمات مفتاحية
خدمات قد تنال إعجابك










طلب الخدمة
سعر الخدمة
$20.00
تطويرات اختيارية
اضافة تصميم روبوت واقعي للمحاكاة بدلا من النموذج الاساسي
5.00
|
|
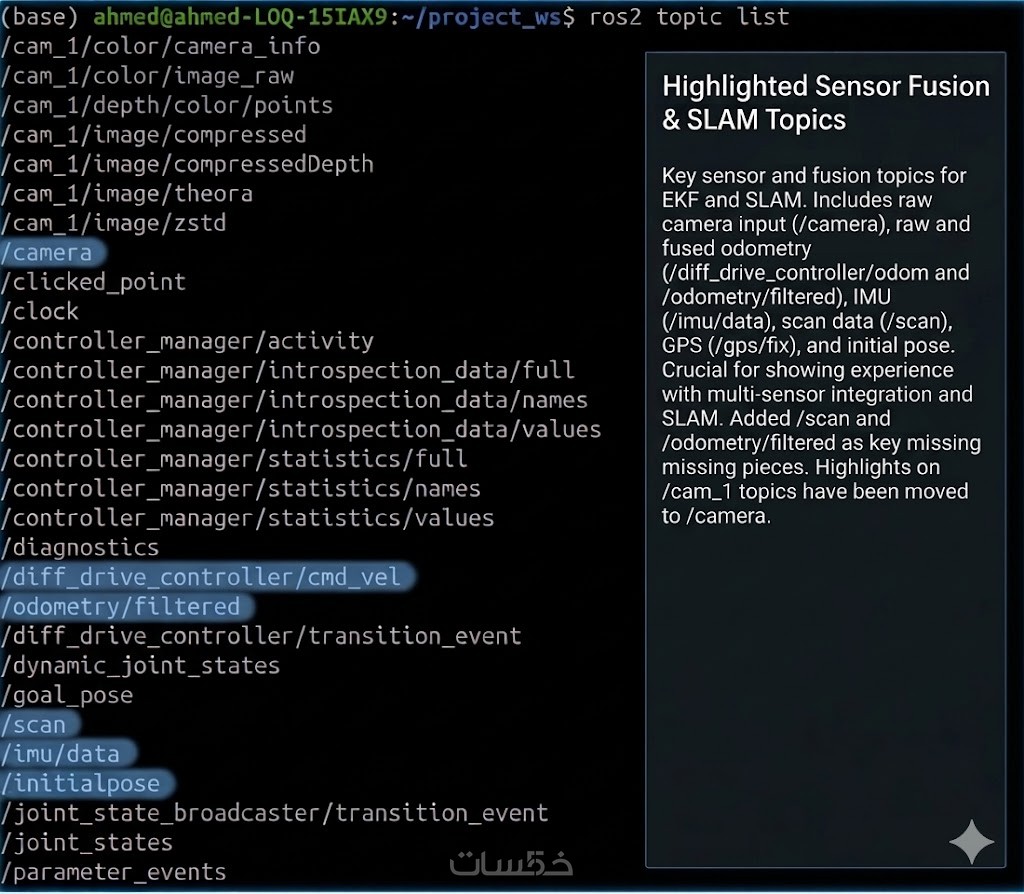
اضافة حساسات ودمج بياناتها لتكون الحركة اسهل واكثر استقرارالحساسات المضافة : Camera+ Imu
15.00
|
|
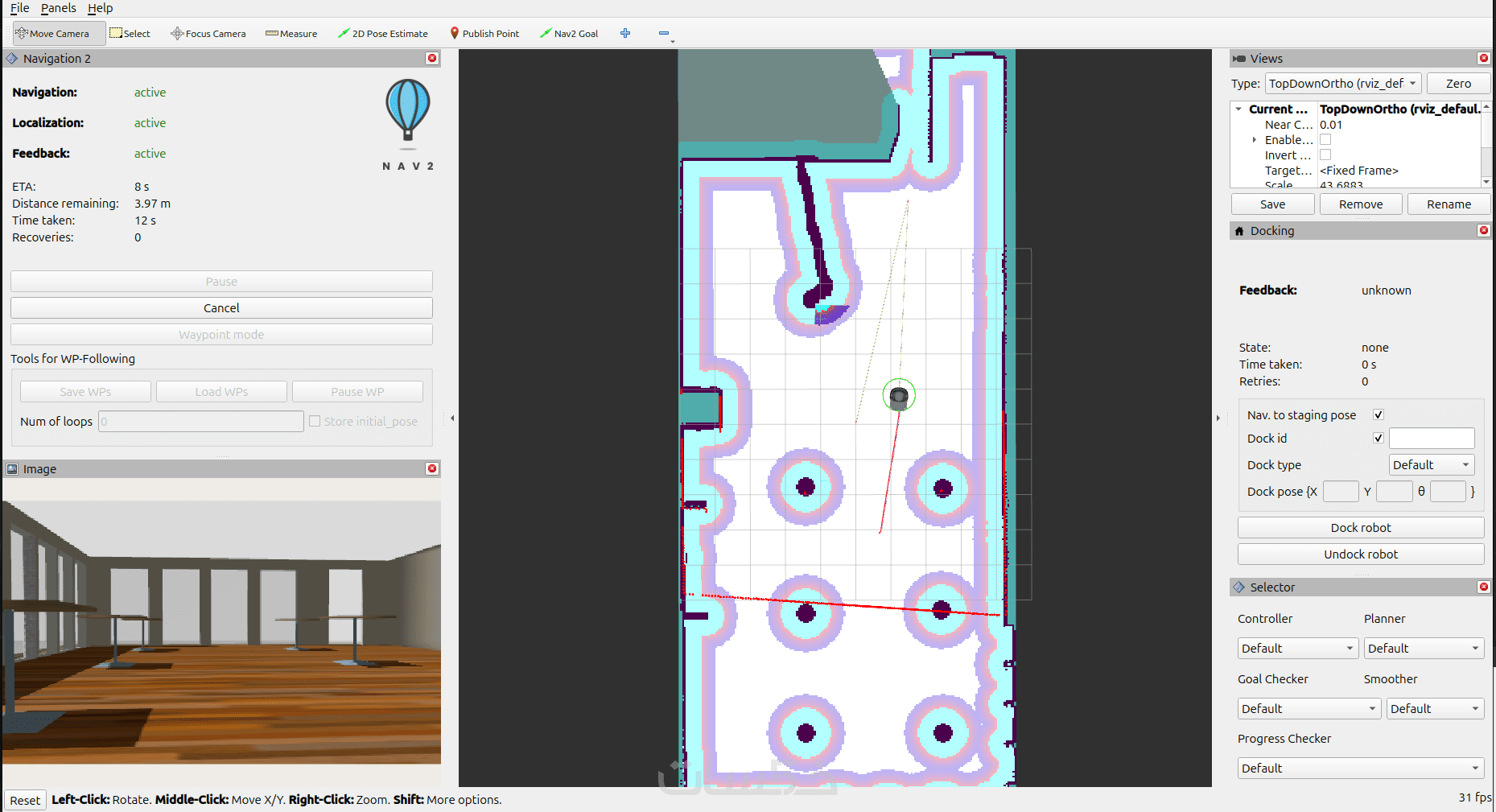
اضافة خاصية التحريك الذاتي للروبوت وتجنب العوائق عن طريق اضافة [Navigation+Slam]
40.00
|
|
جلسة شرح مباشر لمدة ساعة لشرح المشروع وطريقة تشغيله والاجابة علي الاسئلة عبر (zoom او Google Meet)
5.00
|
|
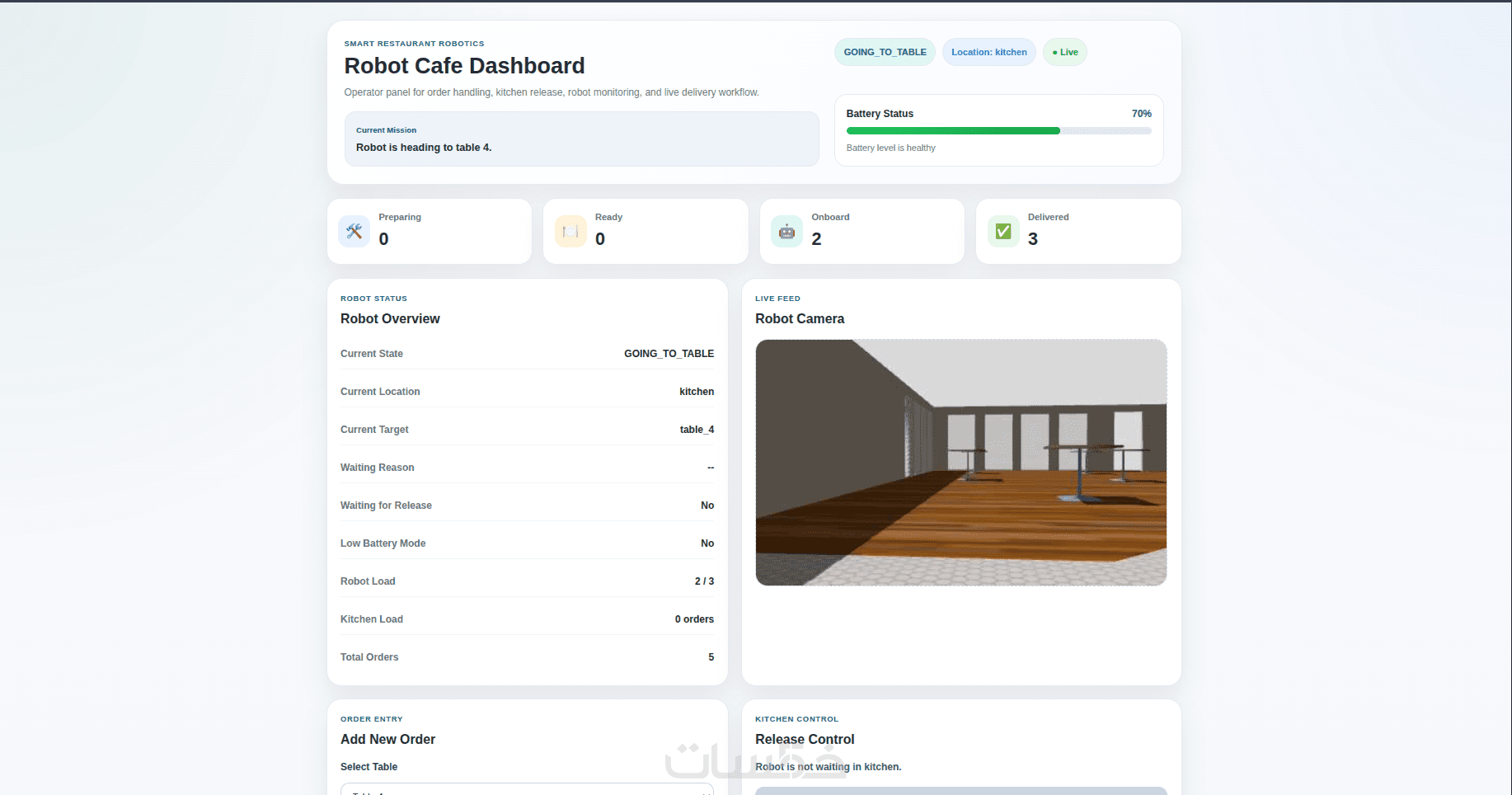
بناء واجهة ويب للتحكم في الروبوت ومتابعة بيانات القادمة من بيئة الروبوت
50.00
|


طلب الخدمة
سعر الخدمة
$20.00
تطويرات اختيارية
اضافة تصميم روبوت واقعي للمحاكاة بدلا من النموذج الاساسي
5.00
|
|
اضافة حساسات ودمج بياناتها لتكون الحركة اسهل واكثر استقرارالحساسات المضافة : Camera+ Imu
15.00
|
|
اضافة خاصية التحريك الذاتي للروبوت وتجنب العوائق عن طريق اضافة [Navigation+Slam]
40.00
|
|
جلسة شرح مباشر لمدة ساعة لشرح المشروع وطريقة تشغيله والاجابة علي الاسئلة عبر (zoom او Google Meet)
5.00
|
|
بناء واجهة ويب للتحكم في الروبوت ومتابعة بيانات القادمة من بيئة الروبوت
50.00
|
خدمات قد تنال إعجابك
كلمات مفتاحية
